


 1
1 2
2 1
1


从现在知道的信息来看,应该还是ARM架构,除了ARM也没什么适合移动端的新架构。

 登录|注册
登录|注册






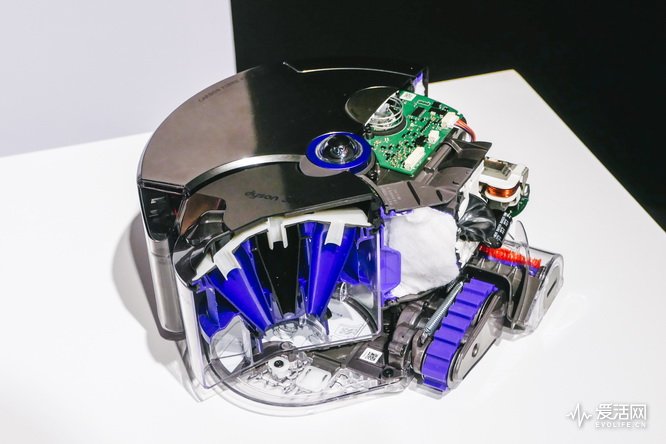
家电圈潮牌戴森刚刚发布了新品Dyson 360 Eye扫地机器人,科幻的外观,一如继续强大吸力,迷你履带行动装置无一不是话题点,尤其是那360°全景视角导航技术更是让人感到兴趣。该导航技术有何厉害之处,市面上其他扫地/擦地机器人应用导航技术还有哪些?
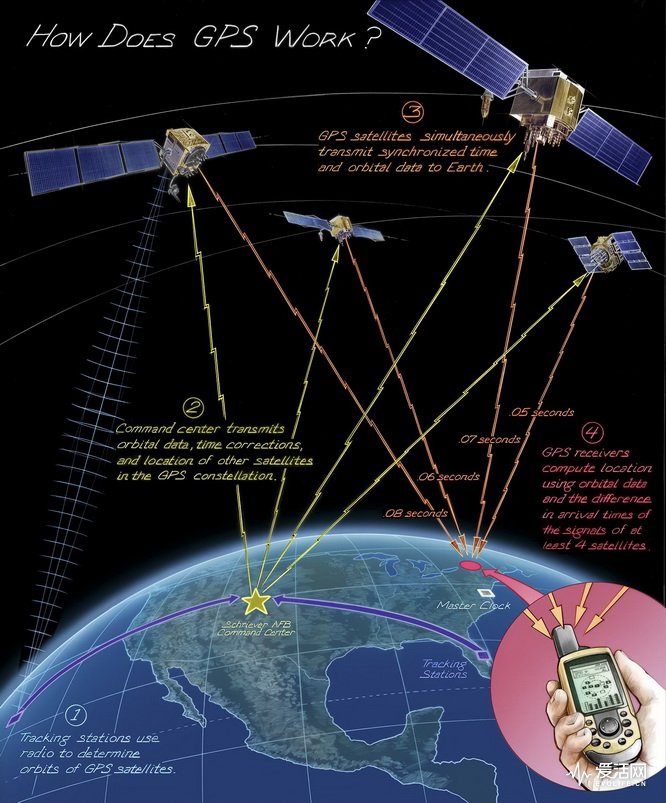
提到导航相信很多人首先想到的是室外GPS导航或是室内的WiFi定位,前者只要手机、车载导航仪连接上4颗GPS卫星,即可根据传递信息耗费时间计算与卫星的距离,进而算出所在地的经纬度与海拔高度。WiFi定位原理与GPS相似,不过是以WiFi基站替代了GPS卫星,最后得知在室内空间中的平面位置。可GPS信号难以深入钢筋混凝土层层阻隔的室内,家中布置的无线发射器有限,无法覆盖每一个角落,WiFi定位精度(5米左右)更无法满足扫地/擦地机器人的需要。
扫地/擦地机器人导航续求与VR眼镜甚至是无人机有很多相似之处,首先是机器人处于未知的空间当中,不但要知道自己处于空间哪一个位置,而且要知道自己走向哪里;其次是在未知空间运动时,机器人会转向,干扰判断位置。唯一比VR眼镜、无人机简单一点是机器人始终在二维平面中运动,定位所需的自由度少于前面二者,但复杂定位、导航技术也足以让市面扫地/擦地机器人划分为众多流派。
在扫地机器人出现之初,导航技术远没有今天多样化、复杂,航位推算法是初期的导航方式。航位推算法依靠机器人内部的陀螺仪、加速度计等传感器获知机器人运动的方向与加速度计,再加上安装在车轮上的光电码盘记录车轮的转数,就可以获知机器人的运动速度。

航位推算法好处是成本低廉,缺点同样突出,它只知机器人运动状态,无法获悉外部世界信息,随着运动时间增加误差会不断累加,比如说车轮打滑、受到外物碰撞都会影响定位精度。结果单纯采用航位推算法的扫地机器人工作时到处乱跑,反复清洁同一区域,有些区域却得不到清洁,简直蠢哭了,后来随着传感器数量大幅度增加,航位推算法精度才得以提高。
鉴于航位推算法的种种不足,尤其是无法获知自身位置这一点,厂商开始研发不同导航技术,扫地/擦地机器人导航技术开始划分为不同流派。LDS测距+建图是一种获得广泛应用的导航技术,国内的科沃斯、小米,美国的neato均有采用该技术的扫地机器人。

采用LDS测距的扫地机器人都有一个特征,就是头顶一个小圆盘。LDS激光测距仪被安置圆盘之中,通过旋转底座与机器人主体相连,这样测距仪就像坦克炮塔一样,能够360°旋转,射出激光,根据激光反射回来所耗费时间计算出机器人与被射物的距离,最终把海量距离数据转换为一张清洁地图。清洁时按图索骥,避免重复清洁、漏清洁,少走错路节省电力。

要发表评论,您必须先登录。



视觉要是环境光线不足会导致什么结果