


 0
0 0
0 0
0

从现在知道的信息来看,应该还是ARM架构,除了ARM也没什么适合移动端的新架构。

 登录|注册
登录|注册






寻找最有效率的路径一直是工程学上的永久性命题在计算机算法中,为了获取最短路径,研发人员常以名为狄克斯特拉算法作为判断依据进行试验。但复杂的居家环境不是单一算法就能解决的,它需要绕过客厅的冰箱、沙发、桌脚等常见障碍物,并且确保清扫路径覆盖到每一寸地面。规划路径成为工程师们最为头疼的难题,科沃斯技术阵营不断攻坚,最后推出了Smart Navi和Smart Move技术,最近面市的科沃斯地宝朵朵S就采用了Smart Move技术。更让业内人士意外的是,宣称智能路径规划的地宝朵朵S并不需要外部传感器辅助,依靠自身30个传感器就能实现室内实时定位、距离记忆,完成有规律的“弓”字型路线行走。那么Smart Move究竟是如何做到的呢?让我们一起一探究竟。

最佳路径如何诞生的?
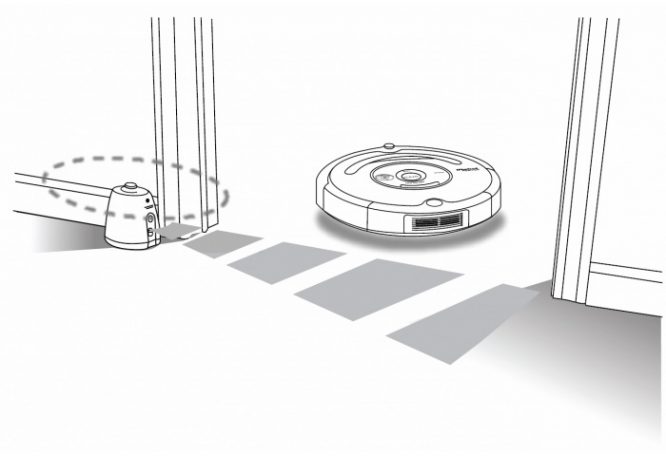
早期由于技术和算法的不成熟,在解决路径问题上扫地机器人几乎全线处于放弃了治疗的状态。即使是某些旗舰级扫地机器人型号,也曾一度采用横冲直撞的随机清扫模式。随机清扫效率低下已经众所周知,但更令人头疼的是随机清扫甚至不能确保每一块地面都能被覆盖。这也是为什么很多扫地机器人要限定清扫范围,用离机传感器设定电子墙,在有限续航时间内,扫地机器人随机清扫只有通过限定区域才能完成清扫任务。
为了解决机器人与居家环境匹配,优化扫地路径问题,厂商们费尽心思。通常而言,高端扫地机器人会内置多个传感器对家庭进行测绘,通过LDS测距、记录最终得出一个居家平面图。由于需要外部传感器辅助,价格也居高不下。当然也有厂商尝试将摄像头安装在机器人顶部,通过图像记录进行测绘,趴在地上乱跑的摄像头设计本身足以让室内穿裙子女生大为紧张。

可以这么理解,扫地机器人想要有效的清理家里地面,必须经过外部环境识别,再到路径规划。收集数据的困难是,在足够多的数据噪音中获取有效数据,整理出正确路径规划并付诸实践,并且要在成本上有所控制才算是真正成功的产品。
科沃斯地宝朵朵S的路径规划在一开始就已经被确立沿弓字行走,事实上科沃斯大量用户反馈中,反应扫地机器人乱走乱撞的不在少数。地宝朵朵S拥有多达30个传感器,这也是Smart Move的关键。
 与室外依靠GPS、北斗星定位不同,居家环境对于机器而言更为复杂。在地宝朵朵S的30个传感器中,有能够根据定位移动方向和坐标,自身记录机器所在位置。这意味着地宝朵朵S移动行为必须是一个迅速、有规律的过程,这样才能确保机身内记录行之有效。因此在移动过程中,地宝朵朵S也会通过传感器进行灵敏的响应,对移动角度进行细微调节,确保机器一直保持匀速直线行走。同样在转向过程中,传感器同样能帮助机器完成90度的转向,最终确保机器严格遵循弓字行走。
与室外依靠GPS、北斗星定位不同,居家环境对于机器而言更为复杂。在地宝朵朵S的30个传感器中,有能够根据定位移动方向和坐标,自身记录机器所在位置。这意味着地宝朵朵S移动行为必须是一个迅速、有规律的过程,这样才能确保机身内记录行之有效。因此在移动过程中,地宝朵朵S也会通过传感器进行灵敏的响应,对移动角度进行细微调节,确保机器一直保持匀速直线行走。同样在转向过程中,传感器同样能帮助机器完成90度的转向,最终确保机器严格遵循弓字行走。
 撞板中有红外缓冲传感器,可以帮助机器预判前方障碍物。在前进过程中,一旦识别前方桌脚、墙壁或者其他障碍物,地宝朵朵S则会启动缓冲机制,缓慢的接触家具,确保机身以及家具本身不受到损害,同时也能让机器触及到房间地面的每一个角落。
撞板中有红外缓冲传感器,可以帮助机器预判前方障碍物。在前进过程中,一旦识别前方桌脚、墙壁或者其他障碍物,地宝朵朵S则会启动缓冲机制,缓慢的接触家具,确保机身以及家具本身不受到损害,同时也能让机器触及到房间地面的每一个角落。
 为了处理传感器收集的数据,科沃斯准备了两套独立芯片用于实现Smart Move技术,除了记录机器的当前位置、调整行走方式,同时科沃斯自己独有的算法也是确保地宝朵朵S。基本上而言,独创算法、独立芯片组是Smart Move技术的保障。
为了处理传感器收集的数据,科沃斯准备了两套独立芯片用于实现Smart Move技术,除了记录机器的当前位置、调整行走方式,同时科沃斯自己独有的算法也是确保地宝朵朵S。基本上而言,独创算法、独立芯片组是Smart Move技术的保障。


